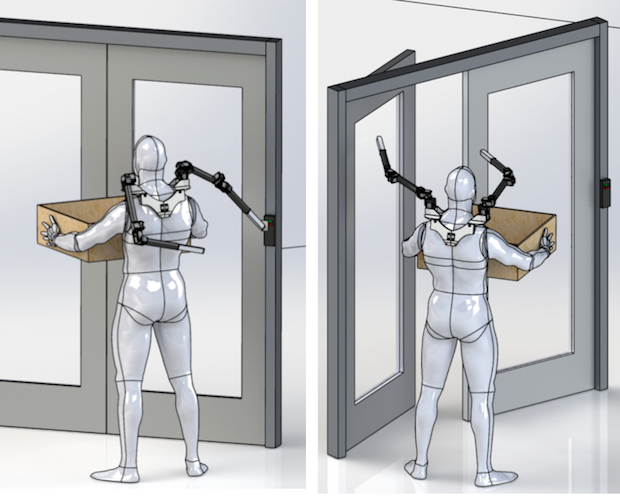
マサチューセッツ工科大学は、背負うことで装着できるロボットアームの開発に成功した。
障がい者のサポートを目的とした義手などとは異なり、既に持っている腕を増やすために設計されている。

装着者の腕にはセンサーがつけられており、ロボットアームはそれに反応して動く仕組み。
アームは目的に合わせてカスタマイズすることができるという。

将来的に実用可能にするため現在も研究開発が進められており、実際にアームを動かす様子が動画でも公開されている。
ちなみに、こんな『千と千尋の神隠し』に出てきたカオナシの腕みたいなバージョンも。

もし腕が4本になったら、あんなことやこんなことをしながらそんなことまで出来ちゃうのかと思うと、胸は高鳴るばかりである。
引用元:IEEE Spectrum
d’Arbeloff Laboratory